주요 기관별 자율주행 기술 개발 현황
주요 기관별 자율주행 기술 개발 현황

교통 효율성과 연료 절감에 관련해서 google의 자동 운전 자동차로 유명한 세바스챤·스 렌 교수에 따르면 미국에선 출퇴근 시간에 교통 체증에 의한 평균 52분이 소비되고, 미국 전체에서는 40억시간으로 휘발유 9억리터가 낭비된다는 것.만약 인프라에 설치된 센서를 통해서 교통 정보 및 신호 변경 정보를 수신하고 차량 간 통신을 통하여 안전 거리를 유지하면서 도로를 주행하면 도로 용량을 높이고 교통 효율을 향상시킬 수 있을 뿐 아니라 많은 연료를 절감할 것이다.마지막으로 자동 운전 자동차는 인구 고령화 추세에서 고령 운전자의 운전을 구하거나 장애인 운전을 대신해서 이동성을 높일 수 있고, 택시, 대리 운전, 주차장 내의 범죄로부터 여성 운전자를 보호할 수 있는 사회적 기능을 가질 수 있다.
인기글
![[유튜브 요약] 월테크넘 - 실제로 기업이 어떻게 AI로 돈을 버는지.. 10개의 데이터를 가져왔습니다. (2024.08.17)](https://rain.komeni.kr/wp-content/plugins/contextual-related-posts/default.png "[유튜브 요약] 월테크넘 - 실제로 기업이 어떻게 AI로 돈을 버는지.. 10개의 데이터를 가져왔습니다. (2024.08.17)")


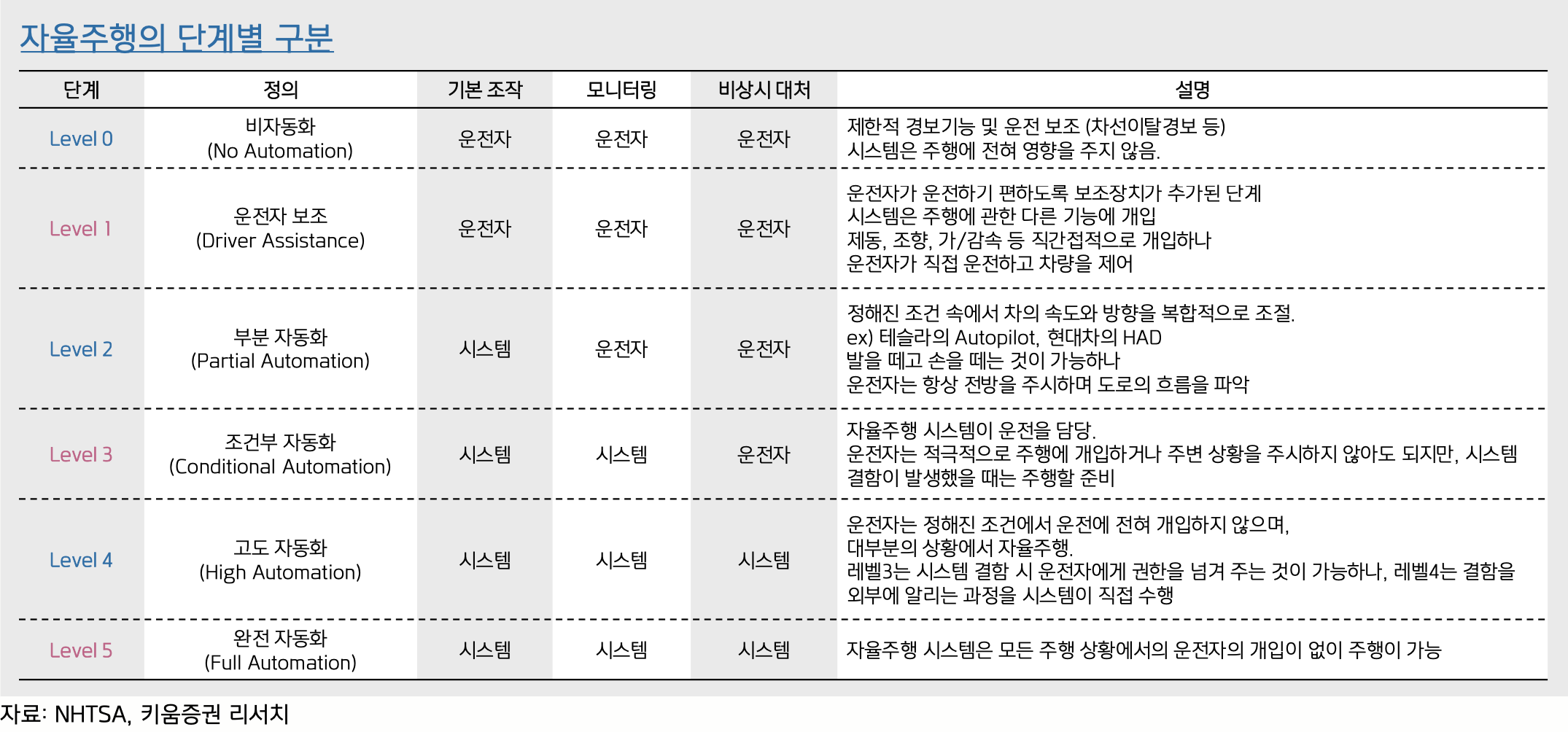
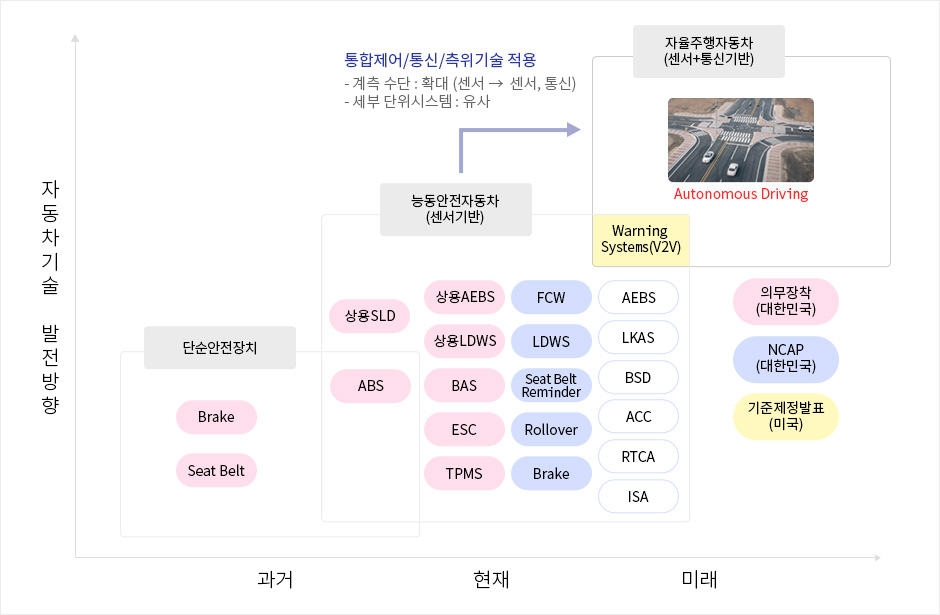
<자율주행 기술의 분류> 먼저 본 글에서는 자율주행 기술과 관련하여 혼재되어 사용되고 있는 용어에 대해 아래와 같이 분류하여 사용하고자 한다.운전자 보조(Driver Assistance) 기술은 세로 방향 또는 가로 방향 중 하나에 대해 운전자에게 경고하거나 제어를 돕는 기술을 말한다.예를 들어 ACC(Advanced Cruise Control)의 경우 세로 방향에 해당하는 속도는 시스템이 제어하고 가로 방향에 해당하는 스티어링을 운전자가 담당하거나 자율주차와 같이 조향은 시스템에 의해 자동으로 이뤄지고 속도 조절만 운전자가 하는 시스템을 들 수 있다.

그 다음에 자동 운전(Automated Driving)기술이 꼽힌다.자동 운전 기술은 종횡 방향의 양쪽에 제어를 돕는 기술을 말한다. 다만 전제 조건으로서 항상 운전자가 주변 상황을 모니터링하며 언제든지 운전에 다시 개입할 수 있다는 가정을 갖고 있다. 예를 들면 고속 도로에서 ACC와 LKS(Lane Keeping System)을 맞춘 서비스의 경우 앞 차와의 간격을 유지하고 현재 차선을 추종하며 필요에 따라서 드라이버가 언제든지 제어를 가로챌 수 있다. 다음에 무인 자동차(Unmanned Vehicle, Driverless car)또는 자동 운전(Self-driving, Autonomous Driving)기술을 들 수 있다.현재는 두가지를 혼용하고 사용할 수도 있지만, 본고에서는 사람이 탑승하지 않는 국방의 같은 분야에서 무인으로 임무를 달성하는 차량을 무인 자동차란 일반 승용차처럼 늘 사람이 탑승한 상태에서 목적지까지만 운행하는 차량을 자동 운전 자동차와 구별한다.앞에서 자동 운전과 자동 운전의 차이는 운전자가 항상 개입할 수 있도록 준비해야 하는지에 의해서 구별한다.자동 운전 차량의 경우 운전자가 신문을 읽거나 잠을 자거나 관계 없이 차가 자동 운전하는 개념에서 앞의 자동 운전과 구별된다.
<자동 운전 기술 구성 요소>자동 운전을 위해서는 주행 환경 인식, 위치 인식 및 비교 판단, 제어, 상호 작용 기술을 필요로 한다.현재까지 자동 운전 자동차 기술은 비싼 라이더와 GPS(Global Positioning System)을 활용하고 주변 환경을 인식하고 자기 위치를 추정하고 있다. 또 인식 정보 처리 및 판단 때문에 여러대의 컴퓨터 클러스터를 이용하고 분산 처리를 하고 있다. 스티어링과 속도, 기어 제어를 위해서는 모터나 센서를 추가하는 등 개조를 통해서 제어하고 있다. google자동 운전 차의 경우에도 수억원의 장비가 탑재되고 있는 실정이다.<자동 운전 자동차 대회>자동 운전 자동차 또는 무인 자동차 기술은 대회를 통해서 많은 관심과 기술이 발전한 측면이 있으므로, 국내외의 관련 대회에 대해서 소개한다.DARPA는 2015년까지 미 육군 장비의 3분의 1을 무인 장비로 대체하는 목적을 갖고 있으며 이를 위한 기술 개발 활성화 때문에 DARPA무인 자동차 대회를 개최하게 된다.2004년도에 개최된 대회에서는 사막과 초원 구간에서 대회를 개최했지만 참가 팀 가운데 누구도 달리지 못했고 이듬해 열린 대회에서 google자동 운전 자동차로 유명한 세바스챤·는 교수가 이끄는 스탠퍼드대 Stanley차량이 6시간 54분의 기록으로 우승했다.2007년도에 열린 DARPA Urban Challenge에서는 캘리포니아 Victorville공군 기지에서 모의 도심 환경을 배경으로 개최되어 CMU Tartan Racing팀의 Boss차량이 4시간 10분으로 통과하며 우승했다.유럽은 단일 차량의 자동 운전이 아니라 V2X(Vehicle to X)통신을 기반으로 한 협력 자동 운전을 목표로 2011년도에 GCDC(Grand Cooperative Driving Challenge)대회가 개최되며 독일 KIT(Karlsruhe Institute of Technology)의 AnnieWay팀이 우승했다.국내에서는 현대·기아 자동차가 2010년부터 무인 자동 운전 기술에 대한 대학의 연구 활성화와 연구 인력 저변 확대에 대학을 대상으로 2년마다 무인 자동 운전 자동차 연구 경진 대회를 열고 있다.2010년 대회에서는 최종 11팀이 경쟁하고 한양대 A1팀, 서울 대학 SNUCLE팀 국민 대학 NOVA팀 등이 우수한 성적으로 입상했으며, 2012년에 개최된 대회에서는 한양대 A1팀이 2대회 연속 우승에 첫 출전한 충북대가 가장 적은 수의 센서를 이용하고 2위를 차지하는 파란을 일으켰다.또 2013년 10월에는 산업 통상 자원부가 주최하고 자동차 공학회 및 자동차 부품 연구원이 주관하는 무인 자동 운전 자동차 경진 대회가 영암 F1경기장에서 예정되어 있다.<자동 운전 관련 프로젝트>1987~1995년 동안 유럽에서는 무인 차량에 관해서 과거 최고의 프로젝트 비용이 투입된 EUREKA PRODUCETHEUS(PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety,)가 열렸다.1994년 Bundeswehr University Munich의 Ernst Dickmanns교수 팀은 Daimler-Benz와 함께 VaMP, Vita-2차량을 이용해서 운전자의 개입이 있는 반자동 운전으로 파리의 다차선 고속 도로에서 최대 130km/h의 속도로 1,000km이상을 주행했다.또 1995년에는 S-Class Mercedes-Benz차량을 이용하고 최대 175km/h의 속도로 독일 뮌헨에서 덴마크 코펜하겐까지 1,590km를 주행했다.1995년 미국 CMU Navlab에서는 “No Hands Across America Project”을 통해서 3000마일을 98.2%자동 운전했다.스티어링은 신경 회로망을 이용해서 자동적으로 제어했지만, 가감 속도는 드라이버에 이뤄졌다.2003~2005년에는 EU FP6의 일환으로서 NETMOBIL프로젝트가 열렸다.자동화된 차량의 개발 및 시위를 위한 CYBERCARS, CYBERMOVE프로젝트와 PRT(Personal Rapid Transit)을 위한 EDICT프로젝트, 운전자 보조로 자동 유도 시스템을 위한 STARDUST프로젝트가 포함되고 있다.2006~2011년의 EUFP7에서 NETMOBIL의 후속 프로젝트로서 CityMobil프로젝트가 열렸다.이 프로젝트에서는 3개의 실제 시험 사이트에서 자동화된 운송 시스템을 테스트할 목적이었다.CityMobil에서는 자동 운전이 가능하다고 인증되는 전용 차로의 개념인 eLane이 제안되었다.HAVEit프로젝트는 “Highly Automated Vehicles for Intelligent Transport”의 약어로, 장기간의 비전을 가지고 자동 운전을 실현하는 것을 목적으로 2008년부터 시작된 프로젝트에서 유럽 지역 17의 산학이 참여했다.프로젝트에서 개발된 서비스로서는, 공사나 입체 구간에서 자동화된 보조(ARC:Automated assistance in Roadworks and Congestion), 군중 주행(AQuA:Automated Queue Assistance)한때 자동 운전(TAP:Temporary Auto Pilot)능동 그린 주행(AGD:Active Green Driving)서비스가 개발됐다.<주요 기관별 개발 현황>Google은 DARPA무인 자동차 대회에서 우승한 Standford대학의 리더인 세바스티안·는 교수와 CMU의 Chris Urmson교수를 포함한 핵심 연구원을 영입, 자동 운전 자동차를 개발하고 있다.google차에는 중 핵 기술인 google지도가 탑재되어 있으며, 차량의 안팎에 4개의 레이더가 천장에는 3차원 라이더, GPS/INS/Encoder이 실내에는 전방을 주시하는 2개의 카메라가 설치되고 차량, 보행자 도로 신호 등을 인식하면서 자동적으로 주행한다.google은 이미 도요타 프리우스와 렉서스 RX450h차량 등 수십대의 차량을 이용하고 캘리포니아 도로와 샌 프란시스코 도로에서 42만 km(지구 12바퀴 거리)의 시범 주행을 했다.세바스챤·는은 다음 단계로 출근 길을 주행하면서 테스트할 예정이라고 밝히고 고속 도로 상의 사슴 같은 동물이나 눈 덮인 도로 경찰 수신 호와 같은 실제 상황에서는 해결해야 하는 상황이 너무 많다고 밝혔다.이탈리아의 Parma대학의 Alberto Broggi교수 팀은 PROMETHEUS프로젝트의 참가를 시작으로 무인 비행체의 연구를 개시하고 그 후 ARGO프로젝트와 DARPA대회에 TerraMax차량으로 참여했다.또 2010년 VIAC(Vislab Intercontinental Autonomous Challenge)을 통해서 이탈리아의 파르마에서 중국 상하이까지 16,000km를 주행했다.최근 2013년 옥스퍼드대 모바일 로봇그룹은 자율주행차 가격을 낮추는 것을 목표로 자율주행차를 개발했다고 발표했다.닛산 리프를 개조한 차량은 2개의 스테레오 카메라와 2개의 레이저 스캐너, 3대의 컴퓨터를 이용해 과거 지나온 길을 학습하고 위치를 추정하는 기술을 사용했다.또 향후 155달러 정도로 시스템 가격을 낮출 수 있을 것으로 예상했다.자동차 업체들도 최근 자동 운전 자동차를 테스트하거나 상용화 계획을 밝혔다.특히 도요타와 아우디는 CES(Consumer Electronic Show)2013에서 자동 운전 차량을 소개했다.도요타는 렉서스 LS600h모델에 GPS레이더 라이더, 카메라를 장착하고 자동 운전하는 차량을 소개하면서 아우디는 전 후방으로 총 12개의 센서를 이용하고 원격 조정으로 주차할 수 있는 무인 주차 기술을 선 보였다.기존의 자동차 업체가 모터 쇼가 아니라 최대 전자 제품 전시회에서 자동 운전 자동차를 선 보였다는 것은 향후 자동차가 IT와 융합하려는 패러다임 변화의 의미도 갖고 있다.<자율주행자동차 기술동향 (안경환 외 3인 지음)> 중